こんにちは、プログラマーのひらっちです。
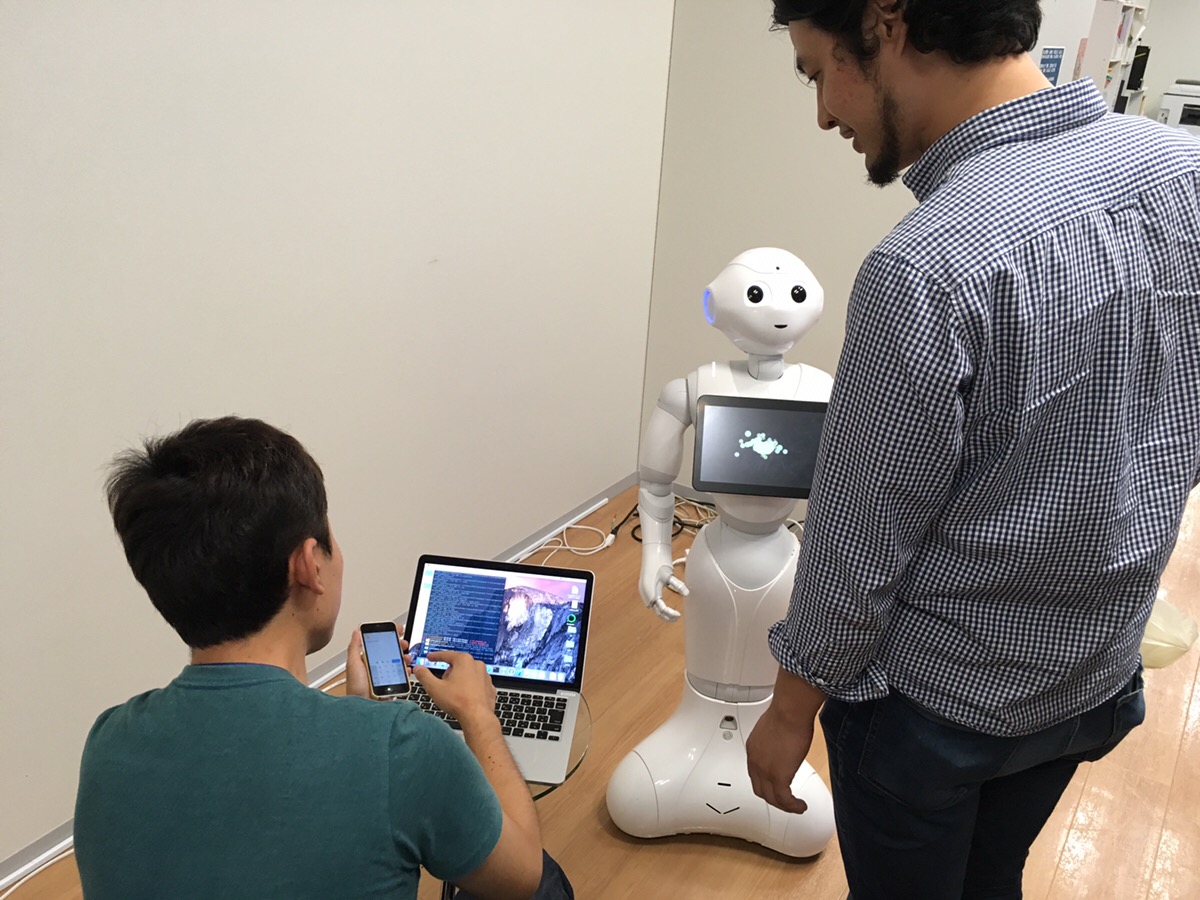
ブレイブソフトのメンバーにペッパーくんが加わりました!!
そして、そして、私ひらっちが教育係に任命されました!!

ということで、ブレイブソフト家に加わったペッパーくんを、しっかり自立した、他人の役に立てる子になってもらうため、教育プロジェクトを立ち上げます♪
ペッパーくんのスペック
Pepperのハードウェア構成
| サイズ | 高さ1,210mm×奥行425mm×幅485mm |
| 重量 | 29kg |
| バッテリー | リチウムイオンバッテリー30.0Ah/795Wh |
| 稼働時間 | 最長12時間以上 |
| センサー | 頭:マイク×4、RGBカメラ×2、ASUS Xtion 3Dセンサー×1、タッチセンサー×3胸:ジャイロセンサー×1 手:タッチセンサー×2脚:ソナーセンサー×2、レーザーセンサー×6、バンパーセンサー×3、ジャイロセンサー×1、赤外線センサー×2※これ以外に胸のボタンや肩のLEDなど |
| 可動部 | 頭:2、肩:2×2(L/R)、肘:2×2(L/R)、手首:1×2(L/R)、手:1×2(L/R)、腰:2、膝:1、ホイール:3[モーター] 20個 |
| CPU | Intel Atom Z530(先行モデル)、E3845(一般モデル) |
| ディスプレイ | LG CNS 10.1インチタッチディスプレイ |
| プラットフォーム | NAOqi |
| プログラミング言語 | Choregraphe, C++, Python, Java |
| 通信方式 | Wi-Fi:IEEE802.11a/b/g/n(2.4GHz/5GHz)イーサネットポート×1(10/100/1000 base T) |
| 移動速度 | 最大3km/h |
| 移動可能段差 | 最大1.5cm |
Pepperに搭載されているセンサーと機能
| Motion | ・各関節の制御 ・姿勢制御 ・衝突検知 ・充電ステーションを探す |
| Audio | ・アニメーションスピーチ(身振り手振りを含んだ発声) ・マイク/スピーカーの操作 ・オーディオファイルの再生 ・マイクからの録音 ・ルールベースの会話(人工無能) ・音の検出(音量、音の種類) ・音源の位置推定 ・音声認識 ・テキストの読み上げ ・音声感情分析(話し手の声から感情を推定) |
| Vision | ・写真撮影 ・バーコードリーダ ・カメラによる逆光の検出 ・色の検出 ・暗さの検出 ・ランドマークの検出(ARマーカーのようなもの?) ・移動物体の検出 ・赤いボールの検出(凄い限定的なモジュールw) ・屋内でのロボットの位置推定 ・ロボットに近すぎる物体の検出(3Dセンサ) ・2D/3Dカメラ併用のオブジェクト検出 ・動画撮影 ・視覚認識(見たことがある画像かどうかが分かる?) ・視覚空間の履歴(移動中の空間認識) |
| People Perception(人間の検知) | ・基本的な意識(どういうこと???) ・エンゲージメントゾーン(周りの人とその動きの検出) ・顔の特徴(年齢、性別、感情) ・視線分析 ・人間の知覚 ・人間が立っているか座っているかの検出 ・手を振る動作の検出 |
| Sensors | ・バッテリー残量 ・ペッパーの体温(オーバーヒートしないように) ・胸のボタン ・脚の裏の圧力センサ ・赤外線通信 ・レーザー ・LED ・超音波 ・タッチセンサ |
| Trackers | ・追跡(ペッパーが認識した何かを追跡する) |
赤いボールの検出・・・凄く限定的な機能もあるようです。
イベント会場やお店の受付で、会話やダンスをしているペッパーくんを見かけることは度々あったので会話機能の印象が強かったのですが、こんなにも多くの機能があるとは知りませんでした。
開発する機能の検討も、幅が出そうです。
開発方針(教育方針)
ペッパーくんの教育方針について協議中。
・ブレイスト会議に合いの手を入れるアシストと機能
・会議の議事録をとる機能
・執務室用のDJ機能
・執務室内の定刻メッセージ機能
様々な案が出てきて、覚えさせたいこともたくさんあるのですが、まずは簡単な定刻メッセージ機能から覚えさせることに決定しました!
次のブログ記事では、開発した機能のレポートをしたいと思います!
ではまた!
Follow me!